目次
短絡強度協調についての概略
目的
短絡強度協調の種類
時間協調(Time Coordination)
- 下位の保護機器(例:分岐回路のブレーカー)が先に動作し、それで遮断できない場合に上位(幹線側)の保護機器が動作。
- 上位:遮断時間が長くなる
下位:遮断時間が短くなる
電流協調(Current Coordination)
- 短絡電流の大きさに応じて、保護機器の設定を変更。
下位は低電流でも遮断できるが、上位は高電流時のみ動作するように調整。
エネルギー協調(エネルギー制限ヒューズなど)
- ヒューズが遮断時に発生させる「遮断エネルギー(I²t)」を考慮し
下位ヒューズのエネルギーが上位ヒューズの耐量より小さいようにする。
=下位ヒューズが先に切れるようにする。
短絡強度協調が必要な理由
- システムの安全性向上
- 不要な停電を防ぐ
- 機器の損傷を最小限に抑える
- 保守性・信頼性の向上
短絡強度協調の具体例
例えば:
主幹ブレーカー(200A)、支線ブレーカー(40A)の設備の場合
短絡が支線で発生した場合、40Aブレーカーだけがトリップして主幹ブレーカーは残るように
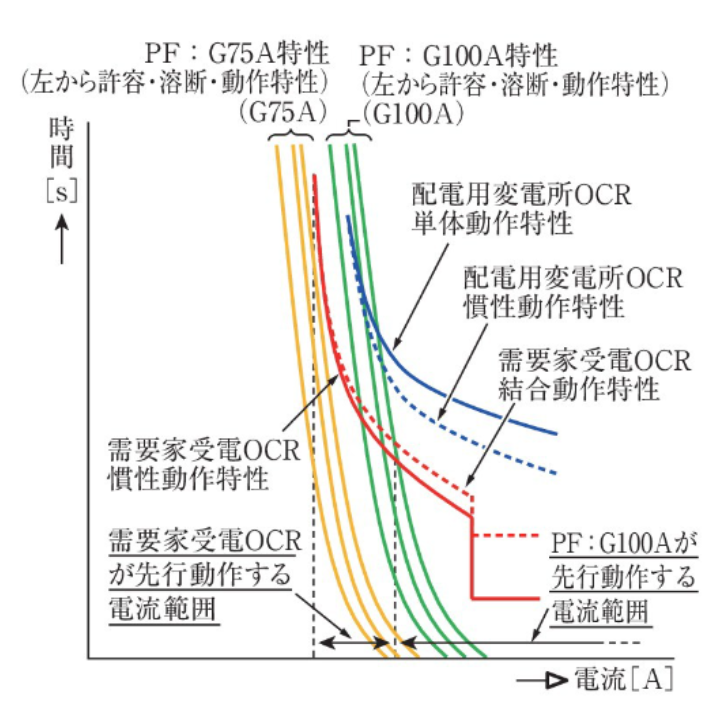
トリップカーブ(時間-電流特性)をずらして設定する。





コメント